Amber Miller
Engineering Portfolio
Last updated: always
Role: Stability & Control, Cost
Stability and Control:
Cost:
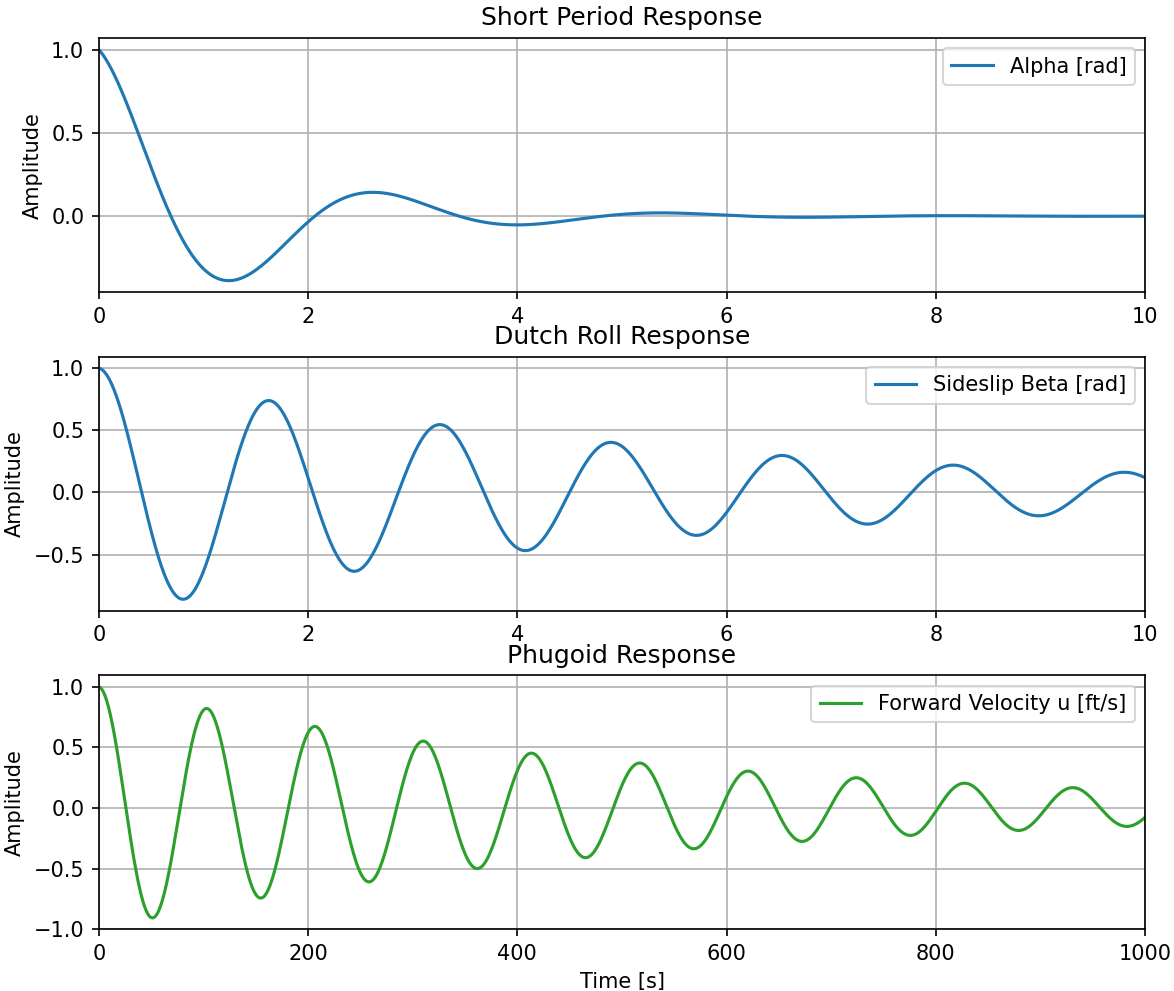
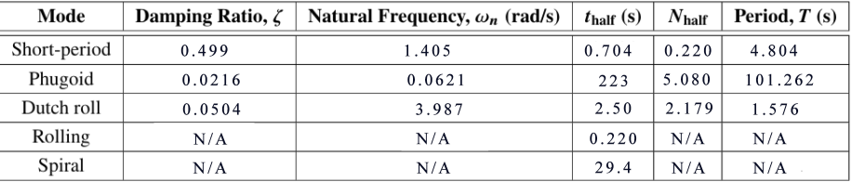
Aircraft Dynamic Stability Analysis
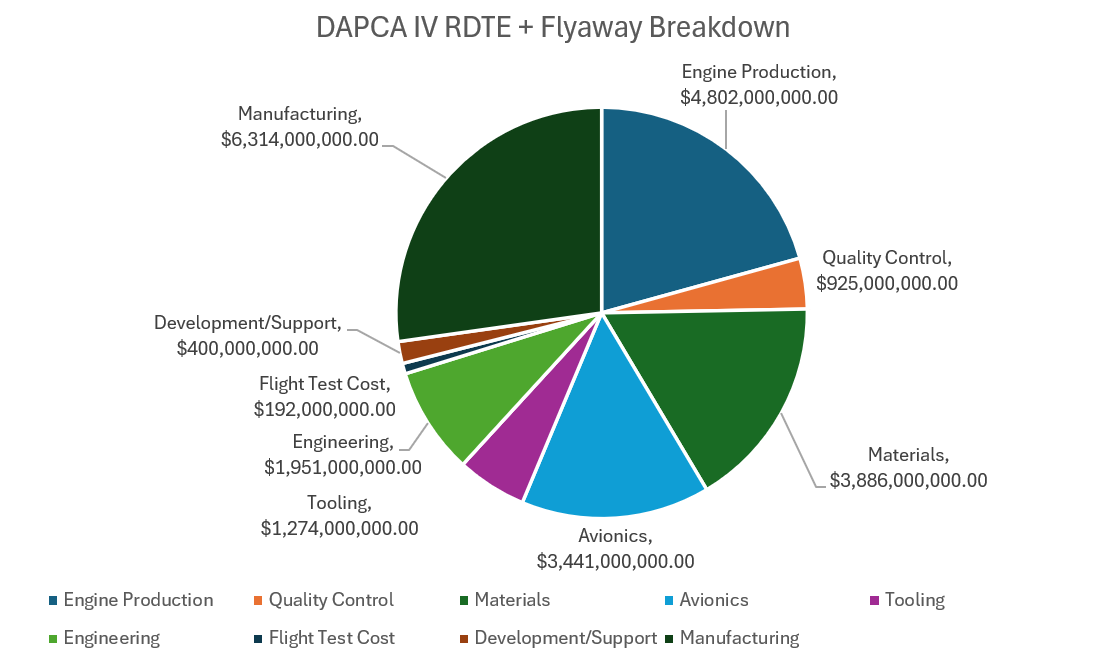
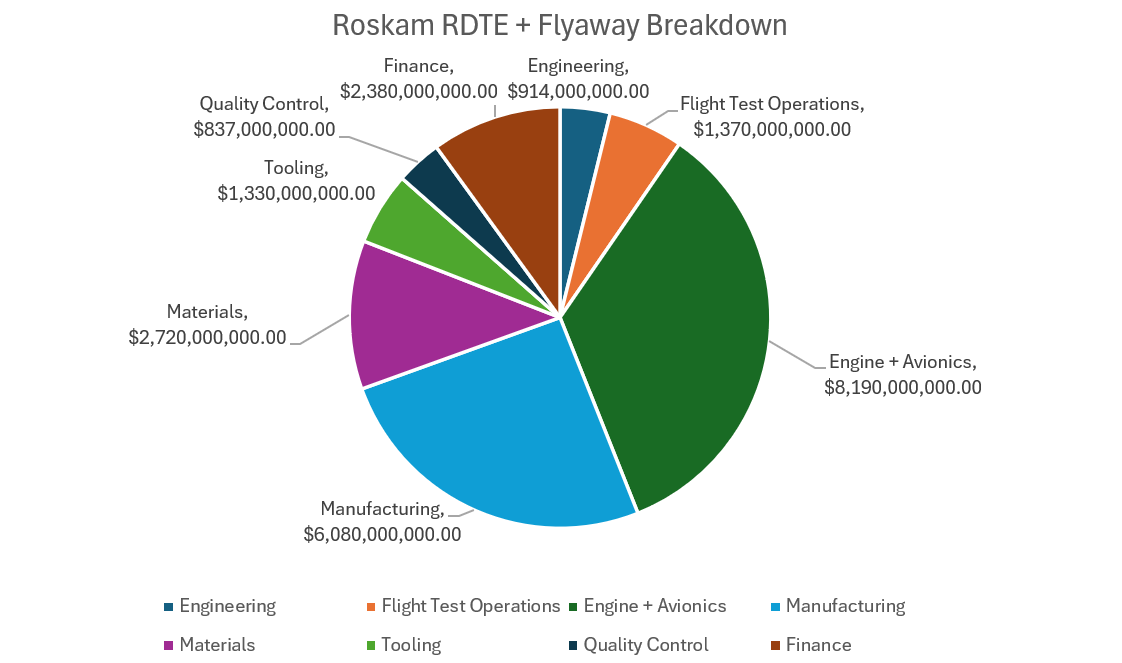
RDTE Cost Analysis
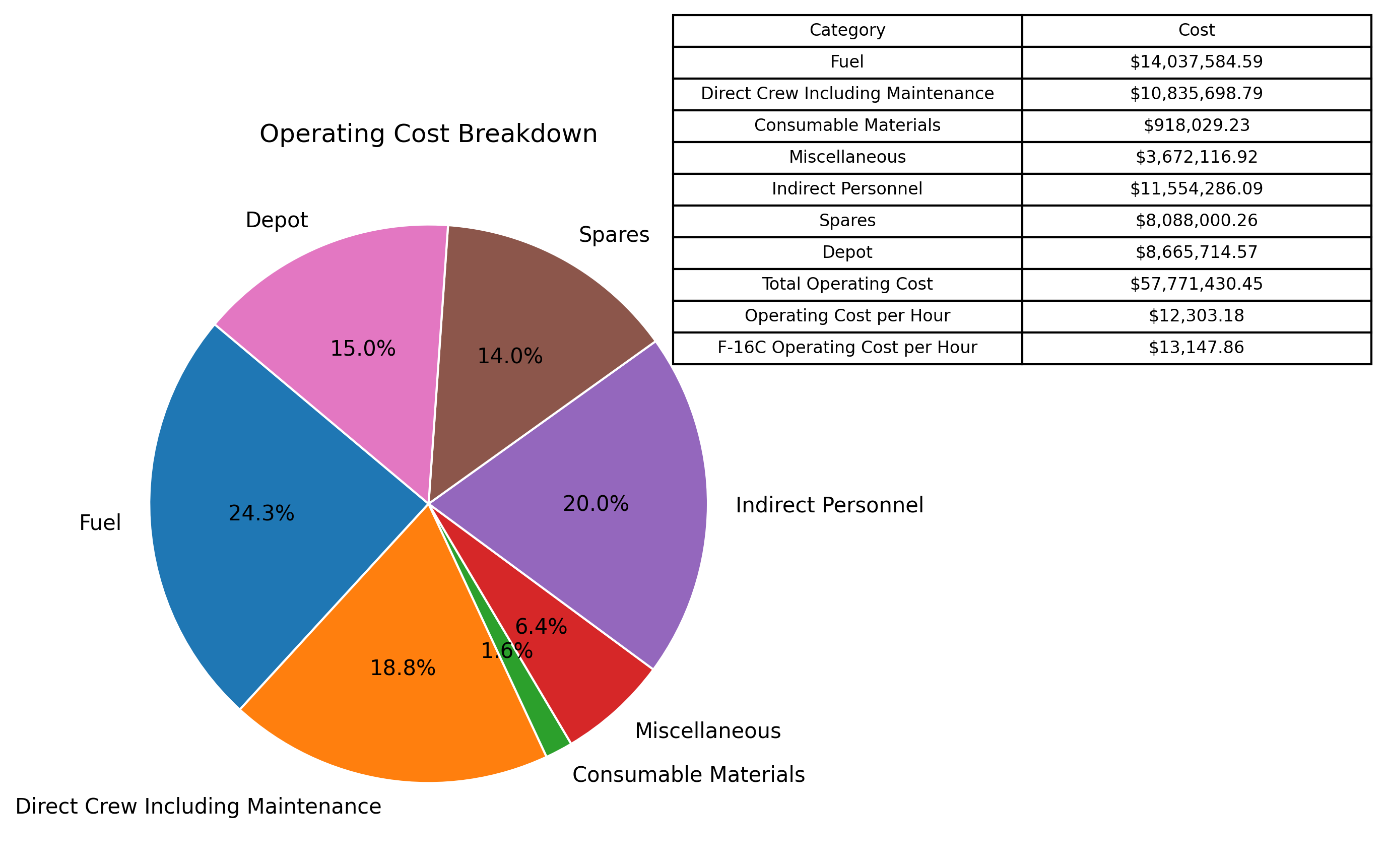
Operating Cost Analysis
Contributions
Project Overview
Motivation:
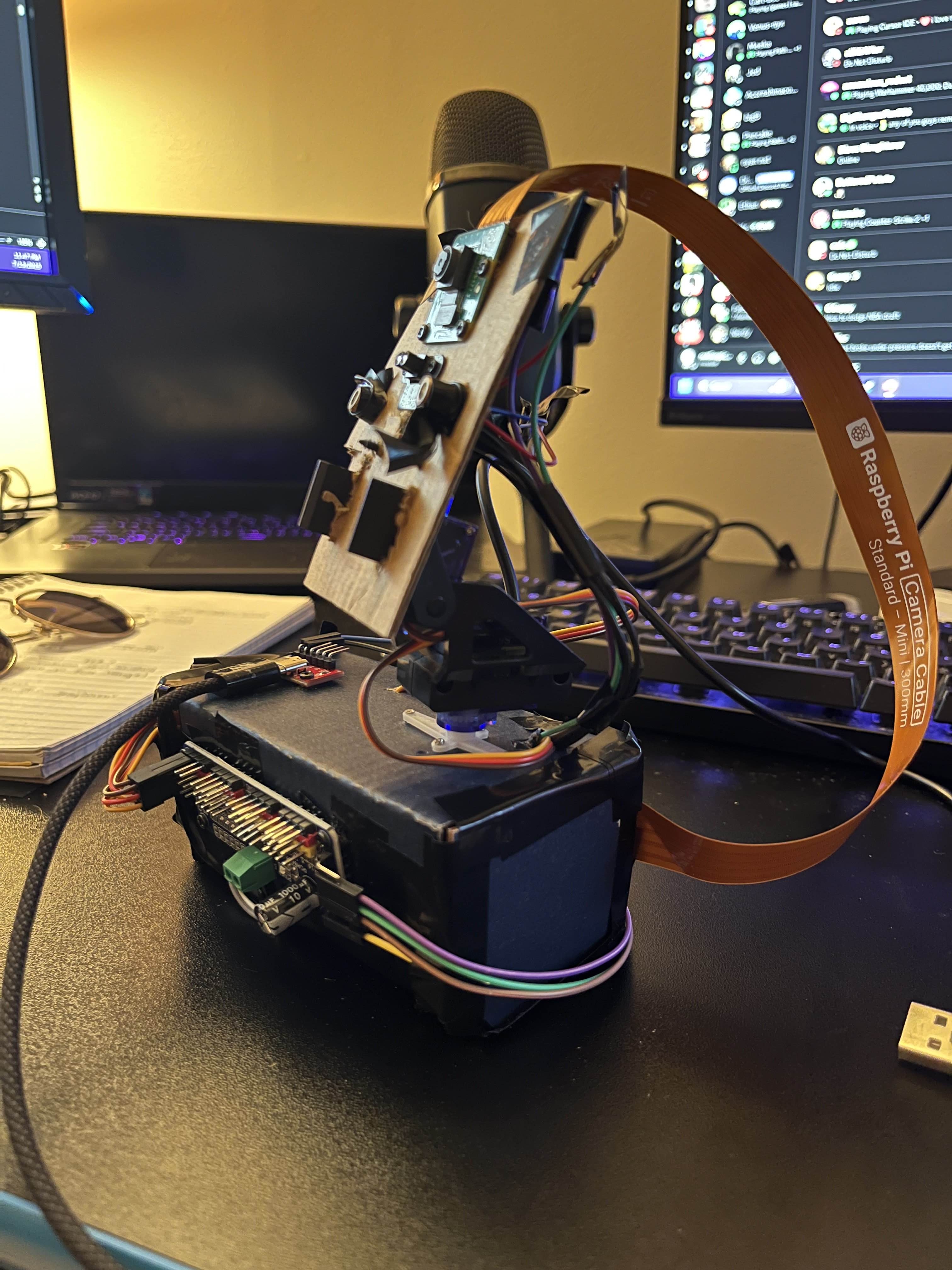
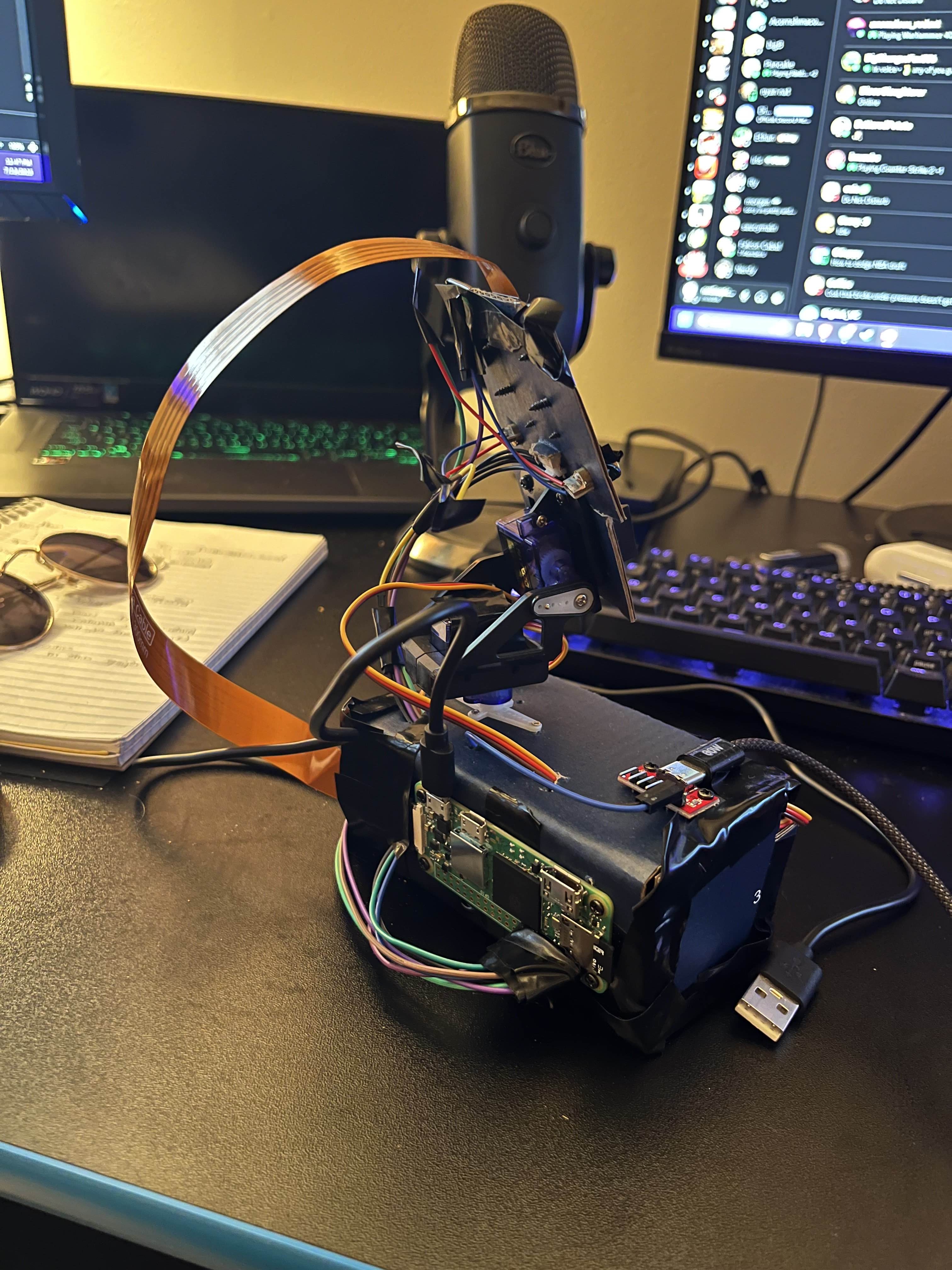
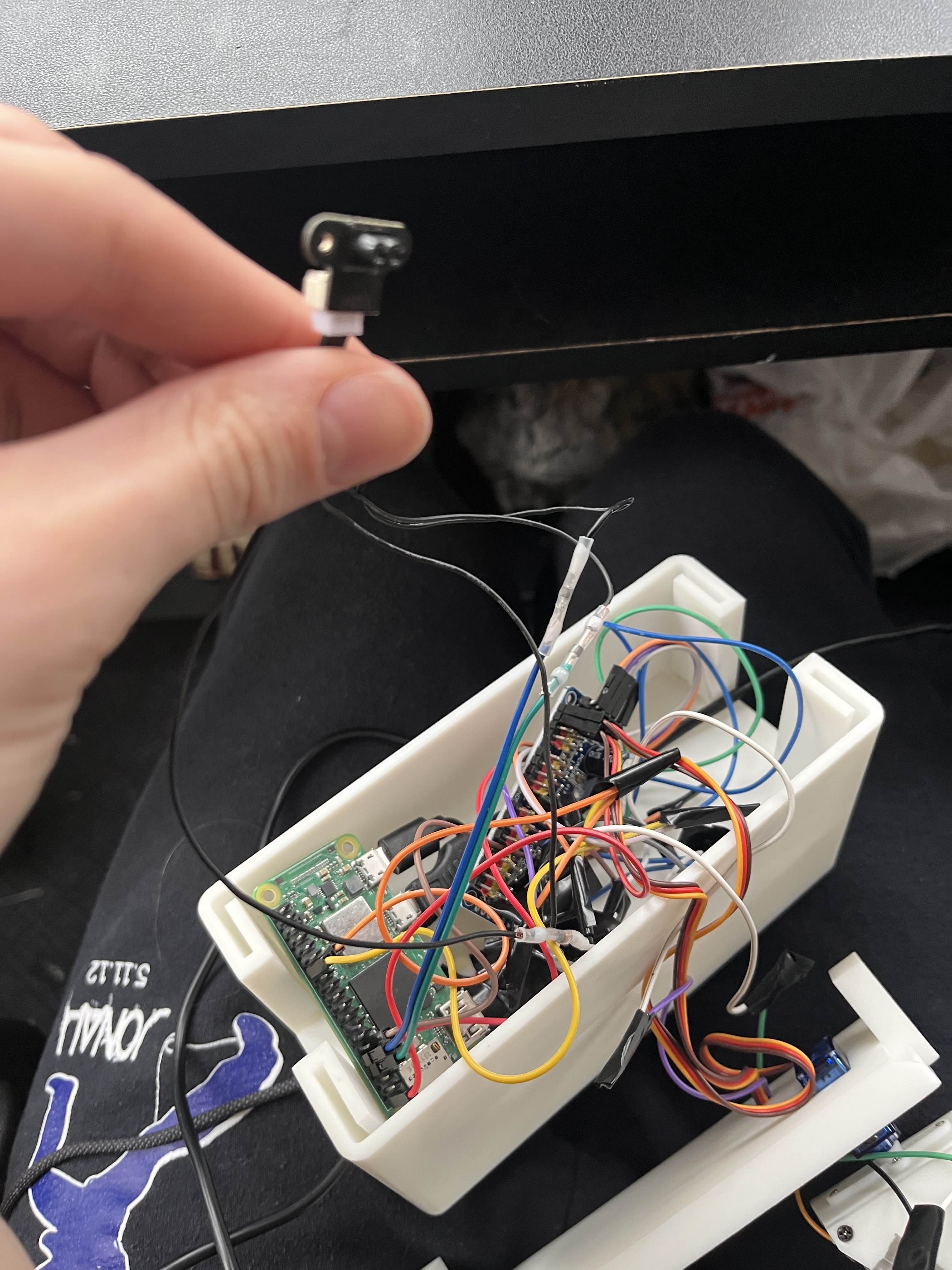
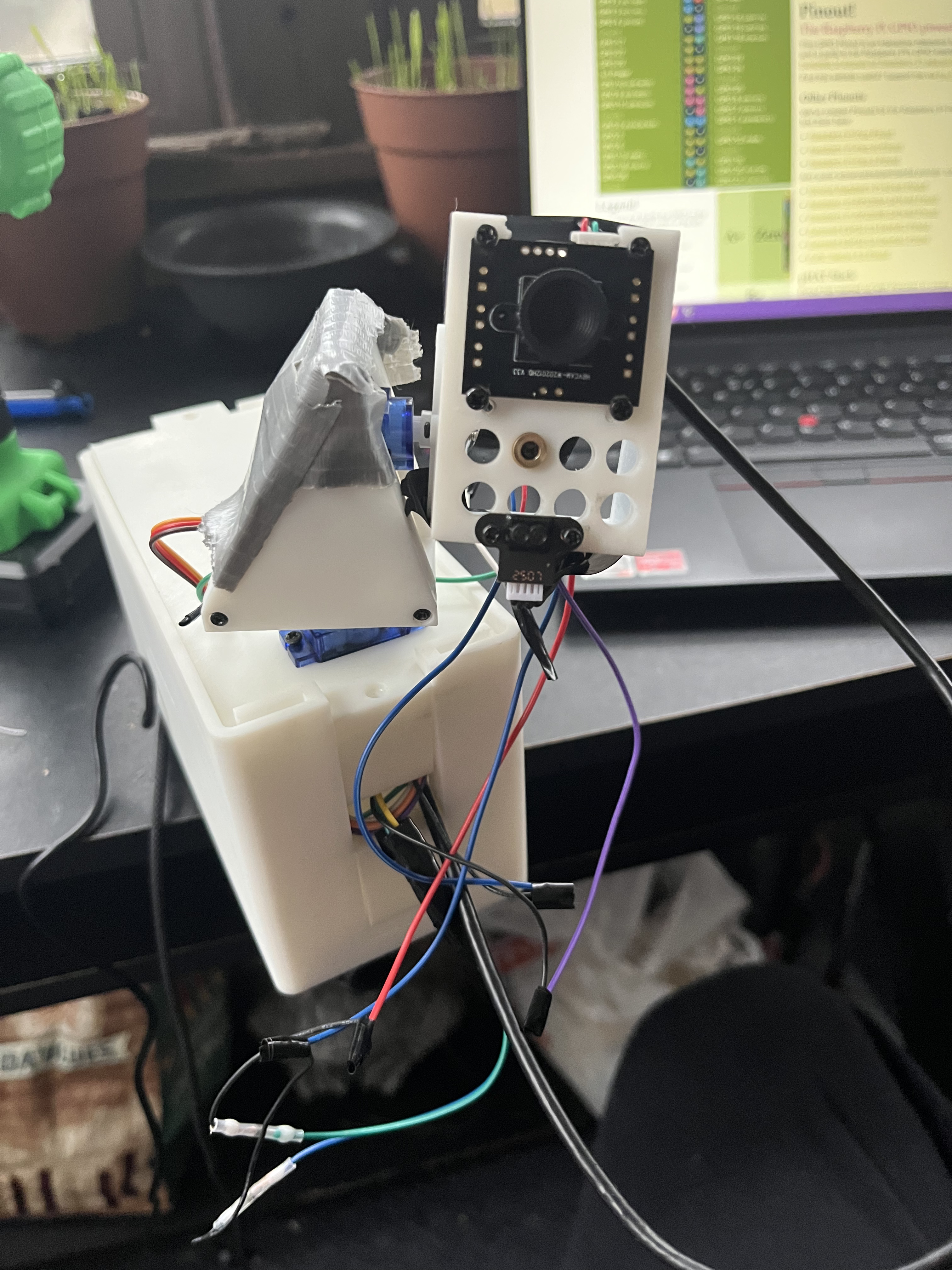
The current market for cat toys contains very few options for a toy which both serves live video and allows the user to remotely play with their cat using a laser pointer. Among these devices, it is typical for the video feed to have a 1500-2000 ms delay due to network latency, video encoding, decoding, and compression, and slow webhosting. Additionally, such devices typically cost upwards of $100 and can require a subscription service to access the video feed. The features on these devices are also very limited. As such, I set out to create a low-cost semi-automatic cat toy robot that could stream live video with minimal latency and allow for remote laser pointer play with my cat, but also enable custom features such as customizable laser patterns, including a modular random trajectory generator, the ability to record and playback laser trajectories, and record and save video, enabling the cat toy to double as a security camera.
Project Overview
Demo Video
Motivation:
While Working at IMEG, the current state of completing fluid volume and pressure drop calcuations involved a lengthy excel spreadsheet where one would measure every individual twist and turn of the pipe and input that along with the pipe dimensions. For a multi-story building, these calcuations could take hours or even days. In addition, older buildings that needed mechanical system renovations often only had 2D blueprints available, and converting these blueprints into a modern BIM model would be a lengthy and expensive process. As such, a method or software was needed that could expedite these calculations, while working on both BIM models and old blueprints. This software must also be intuitive to use and easy to distrubte so as to effectively replace the ubiquitous master excel spreadsheet.
Project Overview